- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Heim
>
Produkte > Schritttreiber vom Typ RS485 oder CAN oder Ethercat-Bus > CAN Open Stepper-Treiber > 2-Phasen-Ethercat Nema34 12 nm Open-Loop-Schritttreiber OL3-E86H
Produkte
- AC-Servomotor
- DC-Servomotor
- Schrittmotor mit geschlossenem Regelkreis
- Hybird-Schrittmotor
- Hybird Schrittmotortreiber
- Schrittmotortreiber mit geschlossenem Regelkreis
- AC-Servomotortreiber
- Integrierter Schrittmotor
- DC-Servomotortreiber
- Schraubenmotor
- Schritttreiber vom Typ RS485 oder CAN oder Ethercat-Bus
- Planetenreduzierer
- SPS-Controller
- HMI-Touchscreen
- Ethercat AC-Servomotor-Treiber-Kit
- A8 AC-Servomotor-Treiber-Kit
- Integrierter Servomotor
Neue Produkte
 Lichuan AC-Servomotortreiber-Kit HIGH POWER 235 Nm 37 kW AC380 V 73 A 1500/2000 U/min IP65
Lichuan AC-Servomotortreiber-Kit HIGH POWER 235 Nm 37 kW AC380 V 73 A 1500/2000 U/min IP65 Lichuan AC-Servomotortreiber-Kit HIGH POWER 191 Nm 30 kW AC380 V 52 A 1500/2000 U/min IP65
Lichuan AC-Servomotortreiber-Kit HIGH POWER 191 Nm 30 kW AC380 V 52 A 1500/2000 U/min IP65 Lichuan AC-Servomotortreiber-Kit HIGH POWER 140 Nm 22 kW AC380 V 44,7 A 1500/2000 U/min IP65
Lichuan AC-Servomotortreiber-Kit HIGH POWER 140 Nm 22 kW AC380 V 44,7 A 1500/2000 U/min IP65 Lichuan AC-Servomotortreiber-Kit HIGH POWER 88 Nm 18,5 kW AC380 V 31,6 A 1500/2000 U/min IP65
Lichuan AC-Servomotortreiber-Kit HIGH POWER 88 Nm 18,5 kW AC380 V 31,6 A 1500/2000 U/min IP65- Alle neuen Produkte

2-Phasen-Ethercat Nema34 12 nm Open-Loop-Schritttreiber OL3-E86H
Sie sind herzlich eingeladen, in die LICHUAN®-Fabrik zu kommen, um den neuesten, preisgünstigen und qualitativ hochwertigen 2-Phasen-Ethercat-Nema34-12-nm-Open-Loop-Schritttreiber OL3-E86H zu kaufen. Wir freuen uns auf die Zusammenarbeit mit Ihnen.
Anfrage absenden
Produktbeschreibung
LICHUAN® heißt Sie herzlich willkommen im Großhandel mit 2-Phasen-Ethercat-Nema34-12-nm-Open-Loop-Schritttreibern OL3-E86H aus unserer Fabrik in China. Unsere Produkte sind CE-zertifiziert und verfügen derzeit über einen großen Lagerbestand im Werk. Die Fabrik in Lichuan verfügt über mehr als 14 Jahre Produktionserfahrung. Wir unterstützen OEM und ODM und bieten Ihnen guten Service und werkseitig ermäßigte Preise. Wir begrüßen weitere Vertriebspartner, die sich LICHUAN anschließen.
Der Closed-Loop-Schrittmotortreiber vom Typ EtherCAT-Bus ist ein digitaler Closed-Loop-Schrittmotortreiber, der das Neueste vereint
Regelalgorithmus und EtherCAT-Bus-Kommunikationsprotokoll. Dieses Produkt unterstützt das CoE-Protokoll (CANopen over EtherCAT) und entspricht dem CIA402-Standard. Im Vergleich zum herkömmlichen Impulstreiber ist der
Bus-Treiber verfügen über eine einfachere Verkabelung, Echtzeit-Datenübertragung, hochzuverlässige Kommunikation und können realisiert werden
Mehrachsige synchrone Kommunikationssteuerung. Diese Treiberreihe ist ein Beispiel für fortschrittliche Closed-Loop-Algorithmen.
Dies kann den Anstieg der Motortemperatur wirksam unterdrücken, Motorvibrationen reduzieren und den Motor effektiv steigern
Drehmoment. Es kann an Closed-Loop-Schrittmotoren der Serie 86 angepasst werden.
Kommunikationsspezifikationen
| EtherCAT Kommunikation Spezifikationen |
Physische Ebene | 100BASE-TX |
| Kommunikationsanschluss | RJ45×2 (Eingang: CN6A; Ausgang: CN6B) | |
| Netzwerk die Architektur |
Serielle Verbindung | |
| Übertragungsrate | 2 x1 Mbit/s (Vollduplex) | |
| Länge des Datenrahmens | Max. 1484 Byte | |
| Protokoll der Anwendungsschicht | CoE: CANopen über EtherCAT | |
| Synchroner Modus | DC-Synchronmodus (SYNCO) Asynchroner Modus (Free Run) |
|
| Kommunikationsobjekt | SDO: aperiodisches Datenobjekt PDO: periodisches Datenobjekt EMCY: Notfallobjekt |
|
| Spezifikation der Anwendungsebene | CiA402 Laufwerksprofil | |
| Unterstützte Steuerungsmodi | Profilpositionsmodus (PP) Profilgeschwindigkeitsmodus (PV) Homing-Modus (HM) Zyklussynchronisierter Positionsmodus (CSP) |
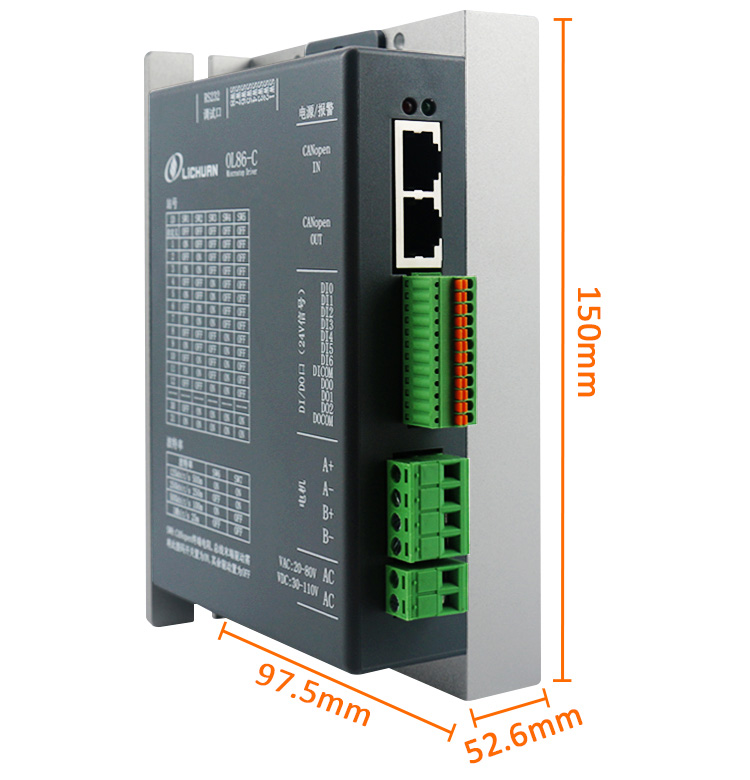
2-Phasen-Ethercat Nema34 12 nm Open-Loop-Schritttreiber OL3-E86H Spezifikationen
| Antriebsmodell Parameter | OL3-E57H | CL3-E57H | OL3-E86H | CL3-E86H |
| Passender Motor | 42/57/60 | 42/57/60 | 86 | 86 |
| Versorgungsspannung | 24–48 V DC | 24–48 V DC | 24–80 V Wechselstrom | 24–80 V Wechselstrom |
| Ausgangsstrom | 5A | 5A | 8A | 8A |
| Laufwerksgröße | 133*34*90 | 133*34*90 | 151*40*114 | 151*40*114 |
| Antriebsgewicht |
|
|
|
|

Lichuan Factory Produktionsproduktmaschine
-

Schnitzmaschine -

Beschichtungsausrüstung -

Faserlaster-Markierungsmaschine -

Schraubmaschine -

Prüfung der Maschine -

UV-Drucker
-

Automatische Lötmaschine -

Haltedrehmoment-Prüfmaschine -

Schraubenmaschine -

Oszillograph-Maschine
Branchenanwendungen
-

Roboterarm -

Laser-Schneide-Maschine
-

3d Drucken -

CNC-Maschine -

Automatische Assertmbly -

Graviermaschine
Hot-Tags: 2-Phasen-Ethercat-Nema34-Schritttreiber mit offenem Regelkreis OL3-E86H, China, Hersteller, Lieferanten, Fabrik, kundenspezifisch, hergestellt in China, günstig, CE, langlebig, Qualität
Verwandte Kategorie
Anfrage absenden
Bitte zögern Sie nicht, Ihre Anfrage im untenstehenden Formular zu stellen. Wir werden Ihnen innerhalb von 24 Stunden antworten.