
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Ein Artikel zum Verständnis des Unterschieds zwischen Schrittmotoren und Servos und Servomotoren
I. Unterschiede zwischen Schrittmotoren und Servos und Servomotoren
Schrittmotor: Ist das elektrische Impulssignal in Winkelverschiebung oder Linienverschiebung der Schrittmotorteile mit offenem Regelkreis. Vereinfacht ausgedrückt beruht es auf dem elektrischen Impulssignal, um den Winkel und die Anzahl der Windungen zu steuern. Er verlässt sich also nur auf das Impulssignal, um zu bestimmen, wie viel Drehung. Da kein Sensor vorhanden ist, kann der Bremswinkel abweichen. Das präzise Pulssignal minimiert jedoch die Abweichung.
Servomotor: Verlassen Sie sich auf die Servosteuerschaltung, um die Geschwindigkeit des Motors zu steuern, und über den Sensor, um die Drehposition zu steuern. Daher ist die Positionskontrolle sehr präzise. Und auch die Drehzahl ist variabel.
Servo (elektronisches Servo): Der Hauptbestandteil des Servos ist der Servomotor. Es enthält einen Servomotor-Steuerkreis und einen Untersetzungsgetriebesatz. Ach ja, der Servomotor hat kein Untersetzungsgetriebe. Und das Servo verfügt über ein Untersetzungsgetriebe.
Bei einem Grenzservo wird der Lenkwinkel des Ruderarms über ein Potentiometer unter der Abtriebswelle bestimmt. Die Servosignalsteuerung ist ein pulsweitenmoduliertes (PWM) Signal, wobei ein Mikrocontroller dieses Signal problemlos erzeugen kann.
II. Grundprinzip des Schrittmotors
So funktioniert es:
Normalerweise ist der Rotor eines Motors ein Permanentmagnet, und wenn Strom durch die Statorwicklungen fließt, erzeugen die Statorwicklungen ein Vektormagnetfeld. Dieses Magnetfeld treibt den Rotor dazu, sich um einen Winkel zu drehen, sodass die Richtung des Magnetfeldpaares des Rotors mit der Richtung des Magnetfelds des Stators übereinstimmt. Wenn sich das Vektormagnetfeld des Stators um einen Winkel dreht. Mit diesem Magnetfeld dreht sich auch der Rotor um einen Winkel. Für jeden eingegebenen elektrischen Impuls dreht sich der Motor einen Winkelschritt vorwärts. Seine Ausgangswinkelverschiebung ist proportional zur Anzahl der Eingangsimpulse und seine Drehzahl ist proportional zur Frequenz der Impulse. Durch Ändern der Reihenfolge, in der die Wicklungen bestromt werden, kehrt der Motor um. Daher können die Anzahl und Frequenz der Impulse sowie die Reihenfolge der Bestromung der Wicklungen jeder Phase des Motors gesteuert werden, um die Drehung des Schrittmotors zu steuern.
Prinzip der Wärmeerzeugung:
Normalerweise sieht man alle Arten von Motoren, die im Inneren einen Eisenkern und eine Wicklungsspule haben. Wicklungswiderstand, Leistung erzeugt Verluste, Verlustgröße und Widerstand und Strom sind proportional zum Quadrat, was oft als Kupferverlust bezeichnet wird. Wenn der Strom nicht der Standard-Gleichstrom oder die Sinuswelle ist, führt dies auch zu harmonischen Verlusten; Der Kern hat einen Hysterese-Wirbelstromeffekt, der im magnetischen Wechselfeld auch Verluste erzeugt, die mit der Größe des Materials, dem Strom, der Frequenz und der Spannung zusammenhängen, was als Eisenverlust bezeichnet wird. Kupfer- und Eisenverluste äußern sich in Form von Wärmeentwicklung und beeinträchtigen somit die Effizienz des Motors. Schrittmotoren streben im Allgemeinen nach Positionierungsgenauigkeit und Drehmomentabgabe, der Wirkungsgrad ist relativ gering, der Strom ist im Allgemeinen größer und die harmonischen Komponenten sind hoch.
III. Ruderkonstruktion
Der Servo besteht hauptsächlich aus einem Gehäuse, einer Leiterplatte, einem Antriebsmotor, einem Untersetzungsgetriebe und einem Positionserkennungselement. Sein Funktionsprinzip besteht darin, dass der Empfänger ein Signal an den Servo sendet und der IC auf der Platine den kernlosen Motor antreibt, sich zu drehen. Die Kraft wird über das Untersetzungsgetriebe auf den Schwenkarm übertragen. Gleichzeitig sendet der Positionsdetektor ein Signal zurück, um festzustellen, ob die Position erreicht ist oder nicht. Der Positionsdetektor ist eigentlich ein variabler Widerstand. Wenn sich das Servo dreht, ändert sich der Widerstandswert entsprechend, und der Drehwinkel kann durch Erfassen des Widerstandswerts ermittelt werden. Im Allgemeinen ist ein Servomotor ein dünner Kupferdraht, der um einen dreipoligen Rotor gewickelt ist. Wenn der Strom durch die Spule fließt, wird ein Magnetfeld erzeugt, und die Peripherie des Rotormagneten erzeugt eine Abstoßung, die wiederum eine Rotationskraft erzeugt. Laut Physik ist das Trägheitsmoment eines Objekts direkt proportional zu seiner Masse. Je größer die Masse des zu drehenden Objekts ist, desto größer ist die erforderliche Kraft. Um eine hohe Drehzahl und einen geringen Stromverbrauch zu erreichen, besteht das Servo aus dünnen Kupferdrähten, die zu einem sehr dünnen Hohlzylinder verdrillt sind und so einen sehr leichten Hohlrotor ohne Pole bilden. Im Inneren des Zylinders, dem Hohlbechermotor, sind Magnete angebracht.
Um unterschiedlichen Arbeitsumgebungen gerecht zu werden, gibt es Servos mit wasser- und staubdichter Ausführung; Als Reaktion auf unterschiedliche Belastungsanforderungen gibt es Kunststoff- und Metallgetriebe für Servos. Metallgetriebe für Servos sind im Allgemeinen drehmomentstark und schnell, mit dem Vorteil, dass die Zahnräder aufgrund übermäßiger Belastungen nicht abplatzen. Hochwertigere Servos werden mit Kugellagern ausgestattet, um die Drehung schneller und präziser zu machen. Es gibt einen Unterschied zwischen einem Kugellager und zwei Kugellagern, natürlich sind die beiden Kugellager besser. Die neuen FET-Servos verwenden hauptsächlich FET (Feldeffekttransistoren), was den Vorteil eines niedrigen Innenwiderstands und damit eines geringeren Stromverlusts als normale Transistoren hat.
IV. Servo-Funktionsprinzip
Von der PWM-Welle in den internen Schaltkreis, um eine Vorspannung zu erzeugen, treibt der Schützgenerator das Potentiometer über das Untersetzungsgetriebe in Bewegung, sodass der Motor stoppt, wenn die Spannungsdifferenz Null ist, um den Servoeffekt zu erzielen.
Die Protokolle für Servo-PWMs sind alle gleich, die neuesten Servos können jedoch unterschiedlich sein.
Das Protokoll lautet im Allgemeinen: hohe Breite in 0,5 ms bis 2,5 ms, um das Servo so zu steuern, dass es sich um verschiedene Winkel dreht.
V. Funktionsweise von Servomotoren
Die folgende Abbildung zeigt eine Servomotor-Steuerschaltung mit einem Leistungsoperationsverstärker LM675, und der Motor ist ein Gleichstrom-Servomotor. Wie aus der Abbildung ersichtlich ist, wird der Leistungsoperationsverstärker LM675 mit 15 V versorgt, und die 15 V-Spannung wird über RP 1 zum Inphase-Eingang des Operationsverstärkers LM675 addiert, und die Ausgangsspannung des LM675 wird zum Eingang des Servomotors addiert. Der Motor ist mit einem Drehzahlmesssignalgenerator zur Echtzeiterkennung der Motordrehzahl ausgestattet. Tatsächlich ist der Geschwindigkeitssignalgenerator eine Art Generator, und seine Ausgangsspannung ist proportional zur Drehzahl. Die vom Geschwindigkeitsmesssignalgenerator G ausgegebene Spannung wird nach einer Spannungsteilerschaltung als Geschwindigkeitsfehlersignal zum invertierenden Eingang des Operationsverstärkers zurückgeführt. Der vom Drehzahlsollwertpotentiometer RP1 eingestellte Spannungswert wird nach der Spannungsteilung durch R1.R2 zum Inphase-Eingang des Operationsverstärkers addiert, was der Referenzspannung entspricht.
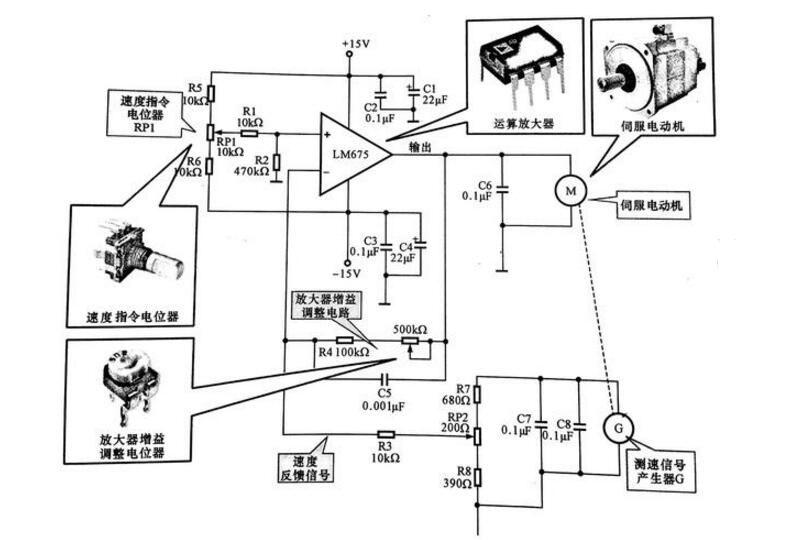
Steuerschema des Servomotors
Servomotor: Mit dem Buchstaben M für Servomotor gekennzeichnet, handelt es sich um die Energiequelle für das Antriebssystem. Operationsverstärker: Der mit dem Schaltungsnamen bezeichnete Operationsverstärker, z. B. LM675, ist ein Verstärkerteil im Servosteuerkreis, der den Antriebsstrom für den Servomotor bereitstellt.
Geschwindigkeitsbefehlspotentiometer RP1: Legt die Referenzspannung des Operationsverstärkers im Schaltkreis fest, d. h. die Geschwindigkeitseinstellung. Potentiometer zur Einstellung der Verstärkerverstärkung RP2: Wird in der Schaltung zur Feinabstimmung der Verstärkerverstärkung bzw. der Größe des Geschwindigkeitsrückkopplungssignals verwendet.
Wenn sich die Belastung des Motors ändert, ändert sich auch die auf den invertierten Eingang des Operationsverstärkers zurückgekoppelte Spannung, d. h., wenn die Belastung des Motors erhöht wird, sinkt die Drehzahl und auch die Ausgangsspannung des Drehzahlsignalgenerators sinkt, so dass die Spannung am invertierten Eingang des Operationsverstärkers abnimmt und die Differenz dieser Spannung zur Referenzspannung zunimmt und die Ausgangsspannung des Operationsverstärkers zunimmt. Wenn umgekehrt die Last kleiner wird und die Motorgeschwindigkeit zunimmt, steigt die Ausgangsspannung des Geschwindigkeitsmesssignalgenerators, die dem invertierten Eingang des Operationsverstärkers hinzugefügte Rückkopplungsspannung nimmt zu, die Differenz zwischen dieser Spannung und der Referenzspannung nimmt ab, die Ausgangsspannung des Operationsverstärkers nimmt ab und die Motorgeschwindigkeit nimmt entsprechend ab, so dass die Drehzahl automatisch auf dem eingestellten Wert stabilisiert werden kann.
Anfrage absenden


X
Wir verwenden Cookies, um Ihnen ein besseres Surferlebnis zu bieten, den Website-Verkehr zu analysieren und Inhalte zu personalisieren. Durch die Nutzung dieser Website stimmen Sie der Verwendung von Cookies zu.
Datenschutzrichtlinie