- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Heim
>
Produkte > Schrittmotor mit geschlossenem Regelkreis > 3-Phasen-Schrittmotor mit geschlossenem Regelkreis > 3-Phasen-Nema23-Schrittmotor mit geschlossenem Regelkreis der Serie 57
Produkte
- AC-Servomotor
- DC-Servomotor
- Schrittmotor mit geschlossenem Regelkreis
- Hybird-Schrittmotor
- Hybird Schrittmotortreiber
- Schrittmotortreiber mit geschlossenem Regelkreis
- AC-Servomotortreiber
- Integrierter Schrittmotor
- DC-Servomotortreiber
- Schraubenmotor
- Schritttreiber vom Typ RS485 oder CAN oder Ethercat-Bus
- Planetenreduzierer
- SPS-Controller
- HMI-Touchscreen
- Ethercat AC-Servomotor-Treiber-Kit
- A8 AC-Servomotor-Treiber-Kit
- Integrierter Servomotor
Neue Produkte
 Lichuan AC-Servomotortreiber-Kit HIGH POWER 235 Nm 37 kW AC380 V 73 A 1500/2000 U/min IP65
Lichuan AC-Servomotortreiber-Kit HIGH POWER 235 Nm 37 kW AC380 V 73 A 1500/2000 U/min IP65 Lichuan AC-Servomotortreiber-Kit HIGH POWER 191 Nm 30 kW AC380 V 52 A 1500/2000 U/min IP65
Lichuan AC-Servomotortreiber-Kit HIGH POWER 191 Nm 30 kW AC380 V 52 A 1500/2000 U/min IP65 Lichuan AC-Servomotortreiber-Kit HIGH POWER 140 Nm 22 kW AC380 V 44,7 A 1500/2000 U/min IP65
Lichuan AC-Servomotortreiber-Kit HIGH POWER 140 Nm 22 kW AC380 V 44,7 A 1500/2000 U/min IP65 Lichuan AC-Servomotortreiber-Kit HIGH POWER 88 Nm 18,5 kW AC380 V 31,6 A 1500/2000 U/min IP65
Lichuan AC-Servomotortreiber-Kit HIGH POWER 88 Nm 18,5 kW AC380 V 31,6 A 1500/2000 U/min IP65- Alle neuen Produkte

3-Phasen-Nema23-Schrittmotor mit geschlossenem Regelkreis der Serie 57
Heißer Verkauf China 57 Serie 3-Phasen-Nema23-Schrittmotor mit geschlossenem Regelkreis, kostenlose Musterhersteller und Lieferanten.
Anfrage absenden
Produktbeschreibung
LICHUAN® heißt Sie herzlich willkommen im Großhandel der 3-Phasen-Nema23-Schrittmotorserie mit geschlossenem Regelkreis der Serie 57 aus unserem Werk. Unsere Produkte sind CE-zertifiziert und verfügen derzeit über einen großen Lagerbestand im Werk. Die Fabrik in Lichuan verfügt über mehr als 14 Jahre Produktionserfahrung. Wir unterstützen OEM und ODM und bieten Ihnen guten Service und werkseitig ermäßigte Preise. Wir begrüßen weitere Vertriebspartner, die sich LICHUAN anschließen.
Der 3-Phasen-Nema23-Schrittmotor der Serie 57 mit geschlossenem Regelkreis, die Verwendung hochwertiger Rohstoffe und hochwertigem Permanentmagnet-Siliziumstahl mit 1000-Zeilen-Hochpräzisions-Encoder überwindet die Schrittprobleme des Schrittmotors mit offenem Regelkreis vollständig und verbessert sie erheblich die Hochgeschwindigkeitsleistung des Motors, um die traditionelle schrittweise Aktualisierung des Antriebsprogramms zu erleichtern und die Kosten im Vergleich zu Servomotoren um mehr als 50 % zu senken. Motorlänge 77 mm ~ 123 mm, Drehmomentbereich: 1 Nm ~ 3 Nm, Motorwellendurchmesser 8 mm. Der 3-Phasen-Nema23-Schrittmotor mit geschlossenem Regelkreis der Serie 57 kann für 4 Treibertypen geeignet sein: RS485. Öffnen können. Ethercat. Impulsgesteuerte Treiber.
Elektrische Leistungsparameter
| Artikel | Spezifikationen |
| Schrittwinkelgenauigkeit | ±5 % (Vollschritt) |
| Widerstandsgenauigkeit | ±10 % (20 ℃) |
| Induktivitätsgenauigkeit | ±20 % (1 kHz) |
| Temperaturanstieg | 80 ℃ max (Nennstrom, 2 Phasen eingeschaltet) |
| Umgebungstemperatur | -20℃~*50℃ |
| Isolationswiderstand | 100 MQMin 500 VDC |
| Durchschlagsfestigkeit | 500 V AC 1 Minute |
| Zulässige Radiallast | 0,02 mm Max. (450 g Ladung) |
| Zulässige Schublast | 0,08 mm Max. (450 g Ladung) |
| Radiale maximale Belastung | 75 N (20 mm von der Flanschoberfläche) |
| Maximale Wellenlast | 15N |
| Serie | Schritt Winkel(") |
Länge (mm) |
Halten Drehmoment (N.m) |
Phase Strom (A) |
Rotation Trägheit (g.cm²) |
Gewicht (kg) |
Encoder-Auflösung (PPR) |
| LC57H355 | 1.2 | 77 | 1.0 | 3.5 | 300 | 1.0 | 1000 |
| LC57H380 | 1.2 | 102 | 2.0 | 3.5 | 500 | 1.4 | 1000 |
| LC57H3100 | 1.2 | 123 | 3.0 | 4.0 | 700 | 1.8 | 1000 |
Oben finden Sie repräsentative Produkte. Produkte können individuell angepasst werden!
Form und Einbaugröße (Einheit: mm)
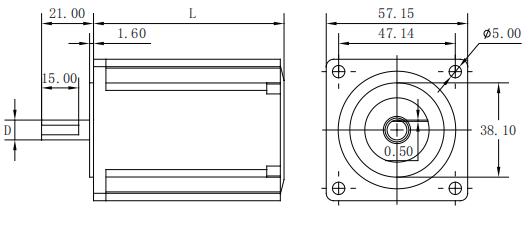
Wellenmodus des Motors
| Modell | Welle Durchmesser (mm) |
Welle Verlängerung (mm) |
Welle Länge (mm) |
| LC57H355 | f8 | D-Schnitt 0,5 x15 | 21 |
| LC57H380 | f8 | D-Schnitt 0,5x15 | 21 |
| LC57H3100 | f8 | D-Schnitt 0,5x15 | 21 |
Motorschaltplan
Motorkabelfarben

Definitionen von Encoder Bleifarben
| 1 | Gelb | EB+ |
| 2 | Grün | EB- |
| 3 | Schwarz | EA+ |
| 4 | Blau | EA- |
| 5 | Rot | +5VCC |
| 6 | Weiß | EGND |
Anmerkungen
1. Beim Anschließen von Motor und Treiber müssen die Phasen korrekt angeschlossen sein.
2. Unter verschiedenen Fahrbedingungen kann es zu einer offensichtlichen Wärmeentwicklung des Motors kommen. Die Oberflächentemperatur des Motors darf während des Betriebs 85 °C überschreiten.
3. Der Motor muss durch die Montagefalz an der Vorderabdeckung des Motors positioniert werden, auf Fehleranpassung muss geachtet werden und die Konzentrizität zwischen Motorwelle und Last muss streng kontrolliert werden.
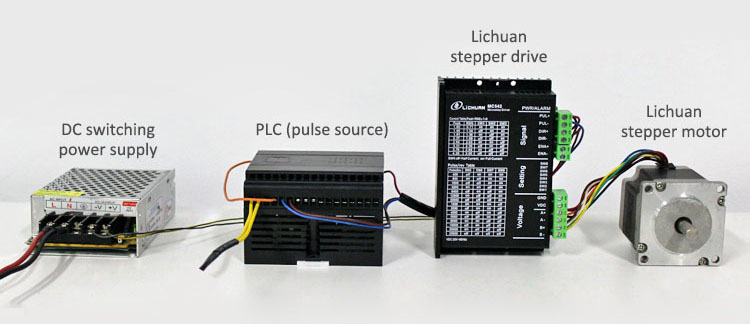
Anwendungsschaltplan
Ein komplettes Schrittmotor-Steuerungssystem sollte das unten gezeigte Produkt enthalten
Produktverpackung

Lichuan Factory Produktionsproduktmaschine
-

Schnitzmaschine -

Beschichtungsausrüstung -

Faserlaster-Markierungsmaschine -

Schraubmaschine -

Prüfung der Maschine -

UV-Drucker
-

Automatische Lötmaschine -

Haltedrehmoment-Prüfmaschine -

Schraubenmaschine -

Oszillograph-Maschine
Branchenanwendungen
-

Roboterarm -

Laser-Schneide-Maschine
-

3d Drucken -

CNC-Maschine -

Automatische Assertmbly -

Graviermaschine
Hot-Tags: 3-Phasen-Nema23-Schrittmotor der Serie 57 mit geschlossenem Regelkreis, China, Hersteller, Lieferanten, Fabrik, kundenspezifisch, hergestellt in China, günstig, CE, langlebig, Qualität
Verwandte Kategorie
2-Phasen-Schrittmotor mit geschlossenem Regelkreis
3-Phasen-Schrittmotor mit geschlossenem Regelkreis
Anfrage absenden
Bitte zögern Sie nicht, Ihre Anfrage im untenstehenden Formular zu stellen. Wir werden Ihnen innerhalb von 24 Stunden antworten.